
IPS ONE
为城市NOA而生
Design for Urban Navigate on Autopilot
IPS ONE 支持L2+以上的高级辅助驾驶,内含高精度GNSS、高性能IMU、车规级 MCU等主要器件,具有CAN、车载以太网等通用的标准接口。
IPS ONE supports the L2+ level and above autonomous driving.
It integrates high-precision GNSS, high-performance IMU, automotive-grade MCU, and other key components, with standard interfaces such as CAN and in-vehicle Ethernet.
硬件搭载自研GNSS/INS多源融合算法、预期功能安全算法、多源完好性检测算法等,为车辆提供更可靠、更安全、更精准的位置、速度、姿态和时间信息。
The hardware is equipped with self-developed GNSS/INS multi-source fusion algorithms, expected functional safety algorithms, multi-source integrity detection algorithms, etc., to provide vehicles with more reliable, safer, and more accurate position, velocity, attitude, and time information.
车规级品质,质量可靠
automotive-grade quality
搭配AEC Q100 车规级 GNSS 芯片、ASIL-D 等级 IMU、ASIL-D 等级MCU
完好性输出,安全护航
Integrity ensuring safety
完备的多源完好性监测算法,保证各种干扰场景、弱GNSS信号、模型假设失效条件下算法鲁棒性。
基础信息
| 工作电压 | DC 9~16V |
| 工作电流 | <600mA |
| 尺寸 | 107mm*77mm*30mm |
| 重量 | 250g |
| 接口类型 | CAN*2,ETH*1,PPS*1,ATN*1,PWR*1 |
RTK性能指标
| RTK性能指标 | |
| 支持的星座频点 | GPS、BDS、Glonass、Galileo、QZSS |
| RTK固定解精度 | 水平:CEP95:10cm 高程:CEP95:15cm (开阔场景) |
| RTK固定率 | 97%(开阔场景) |
| RTK频率 | 10Hz |
| 速度精度 | ≤0.03m/s (1σ) |
| 冷启动时间 | 30s(无星历) 10s (从星历注入开始计算) |
| 热启动时间 | <1.5s (rms) |
IMU性能指标
| 陀螺性能指标 | |
| 量程 | ≥250 °/s |
| 零偏不稳定性 | 4.7°/h (XY) 1°/h (Z) |
| 全温零偏 | ≤0.18dps(XY) ≤0.024dps(Z) |
| 角度随机游走 | ≤0.54°/√h(XY) ≤0.3°/√h(Z) |
| 交轴耦合误差 | ≤0.13%(XYZ) |
| 噪声特性 | ≤0.065°/s (XY) ≤0.034°/s (Z) |
| 加表性能指标 | |
| 量程 | ≥ 6g |
| 零偏不稳定性 | ≤40ug (XY) ≤70ug (Z) |
| 全温零偏 | ≤0.8mg(XY ) ≤1.8mg(Z) |
| 速度随机游走 | <0.05 m/s/√h |
| 交叉耦合误差 | ≤0.08% |
| 噪声特性 | ≤1.2mg(XY) ≤2.3mg(Z) |
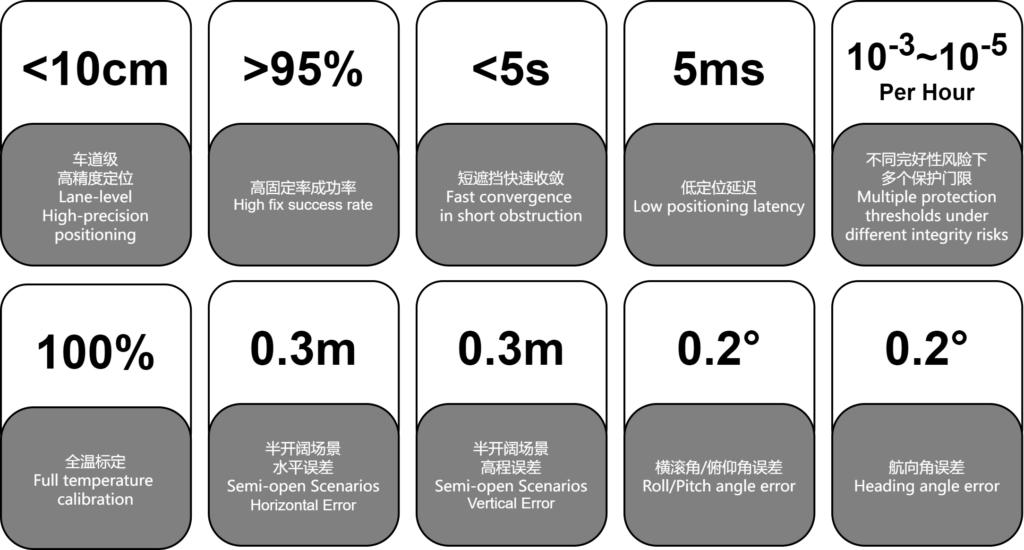
融合性能
| 融合定位精度 | |
| 空旷场景 | 水平 CEP95 10cm 高程 CEP95 15cm |
| 半空旷场景 | 水平 CEP95 20cm 高程 CEP95 30cm |
| 速度精度 | |
| 空旷场景 | 0.03m/s |
| 半空旷场景 | 0.05m/s |
| 航向精度 | |
| 空旷场景 | 0.1° |
| 半空旷场景 | 0.2° |
| GNSS失锁 | |
| 位置漂移 @1km/ 1min | 2m(横向) 5m(纵向) |
| 航向漂移 @1km/1min | 0.15°(1σ) |
| 完好性 | |
| Alert Limit | 1m |
| TIR | < 10-3/h |
| Availability | 高速及城快ODD范围内可信解可用率达95% |